استپ موتور چیست؟
استپ موتور چیست؟
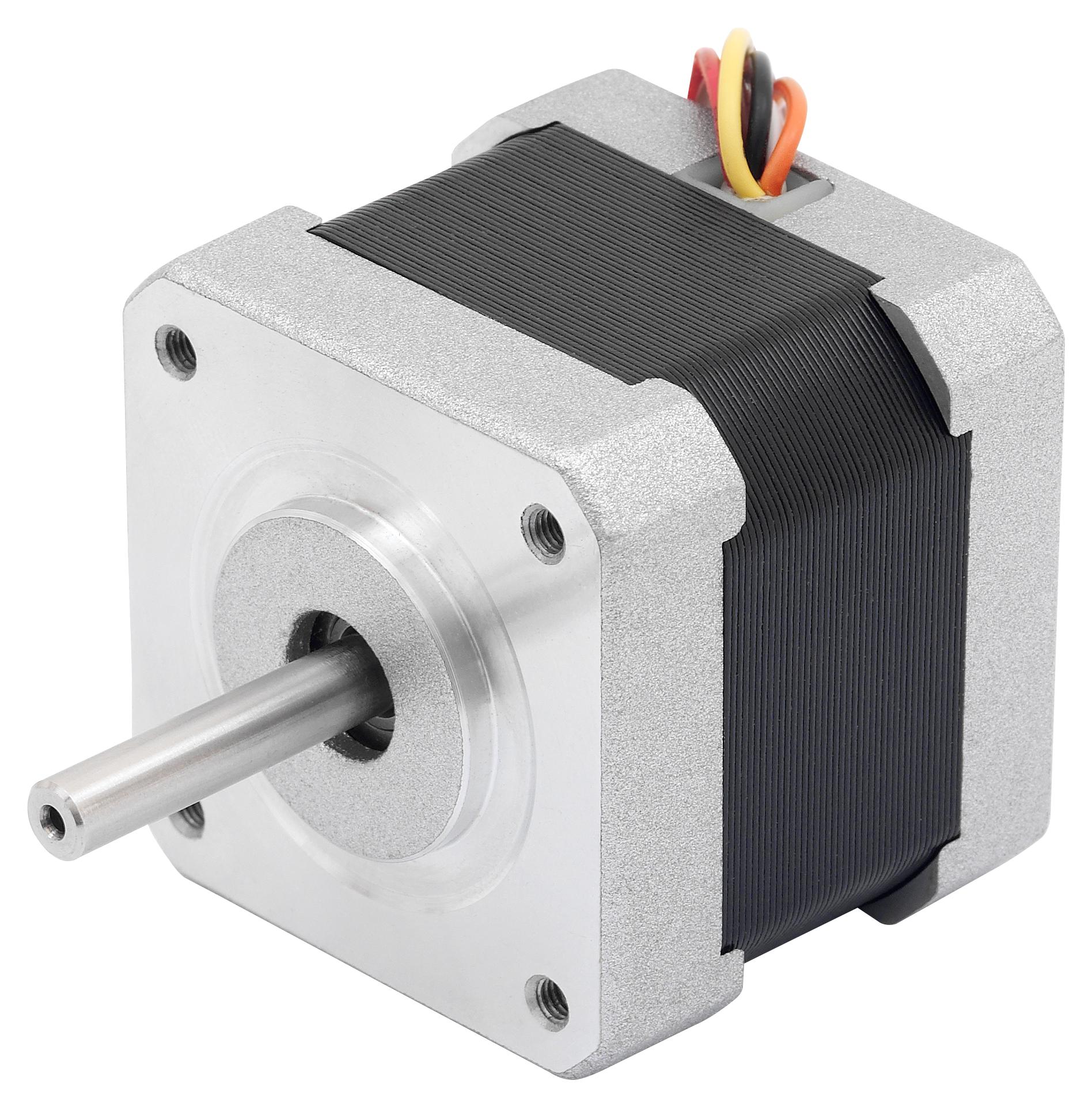
استپر موتور ( Stepper Motor ) که با نامهای استپ موتور یا موتور پلهای نیز شناخته میشود یک موتور براشلس (Brushless ) الکتریکی DC است که یک دور ۳۶۰ درجه یا یک چرخش کامل را به تعدادی پله یا استپ مساوی تقسیم مینماید و در هر پله یا استپ به میزان خاصی بر حسب درجه دوران میکنند. کنترل موقعیت موتور پلهای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک میباشد و این نشانه دقت بالای این موتورها است.
استپ موتورها براشلس ندارند و دلیل اصلی تمایز آنها از سایر موتورها این است که با اعمال پالس به ترمینالهای آن ( عموماً پالسهای موج مربعی ) موقعیت شفت یا محور موتور به میزان مشخص و از پیش تعیین شدهای ( در هنگام تولید موتور ) دوران میکند.
اجزا تشکیل دهنده استپ موتور
- استپ موتور از سه قسمت اصلی تشکیل شده است:
استاتور: در قسمت استاتور تعدادی سیم پیچ با هم گروهبندی شدهاند. مثلاً در استپ موتور دو فاز دو گروه سیم پیچ میبینید که از داخل با هم اتصال دارند که نهایتاً چهار سیم از آنها بیرو ن آمده که دو به دو به هر کدام به گروه سیم چیپها متصلاند. - روتور: با توجه به اینکه گشتاور موتور پلهای و طول موتور پلهای چقدر است تعداد طبقات کمتر یا بیشتری دارد. مثلاً در یک موتور پلهای که ۴ طبقه است اگر میخواهد طول بیشتری داشته باشد میتواند تا ۸ طبقه شود که در نتیجه آن گشتاور استپ موتور بیشتر میشود.
- قاب استپ موتور: در موتورهای پلهای بر خلاف دیگر موتورها در دو طرف آن فقط بلبرینگ استفاده شده است. علت عمر بالای استپ موتور هم همین موضوع است یعنی اثری از زغال نمیبینید که بخواهد تمام شود یا اینکه بوشی وجود ندارد که بوش بخواهد جا بیندازد و خراب شود و عملکرد موتور پلهای را با مشکل مواجه کند.استپ
موتورها چگونه کار میکنند؟
از آنجایی که استپ موتور پالسهای ورودی را به فواصل کوچک مشخص تقسیم میکند، هر پالس شفت را به یک زاویه مشخص میبرد. استپ موتورها اساساً دارای دندانههای مغناطیسی در اطراف یک شفت مرکزی از جنس آهن میباشند. الکترومغناطیسها بوسیله یک مدار راه انداز خارجی یا یک میکروکنترلر تغذیه میگردند. جهت چرخاندن شفت ابتدا به یکی از مغناطیسها توان داده میشود، که مغناطیس باعث جذب دندانههای دنده میگردد. زمانیکه دندانه دنده روبروی اولین مغناطیس میایستد، نسبت به مغناطیس بعدی دارای یک فاصله میباشد. این به این معناست که در صورت روشن شدن الکترومغناطیس بعدی و خاموش شدن اولین دنده به آهستگی میچرخد تا دندانه روبروی مغناطیس دوم قرار گیرد. از آنجا فرایند آغاز میگردد. هر یک از این چرخشها یک گام (استپ) نامیده میشود، تعداد مشخصی از این گامها یک دور کامل موتور را میسازند.
انواع استپ موتور:
چهار نوع اصلی از استپ موتورها وجود دارد:
• استپ موتورهای با مغناطیس دائم
از مغناطیسهای دائم تشکیل گردیده است و با جاذبه و دافعه بین مغناطیس روتور و مغناطیس استاتور عمل مینماید.
• استپ موتورهای سنکرون هایبرید
این گروه را به آین دلیل هایبرید مینامند که در ساختار آنها از دو تکنیک مغناطیس دائم و مقاومت مغناطیسی متغیر با هم، جهت رسیدن به حداکثر توان در کوچکترین فضا استفاده شده است.
• استپ موترهای با مقاومت مغناطیسی متغیر
حداقل مقدار مقاومت مغناطیسی، زمانیکه روتور در حال جذب به سمت قطبهای استاتور است، زمانی رخ میدهد که حداقل فاصله وجود دارد.
• استپ موتورهای لاوت LAVET TYPE
مزایای استپ موتورها:
با هزینه خیلی کم پروژههای کنترل موقعیت میتوان انجام داد. ابعاد کوچکی دارند و در ابعاد کوچک گشتاور زیادی میتوانند اعمال کنند. سایزبندیهای مختلف دارند و بسته به پروژههای مختلف میتوان از آنها استفاده کرد. از دیگر مزایای استفاده از این موتورها میتوان به موارد زیر اشاره کرد:
• کنترل دیجیتالی ساده
• فاقد خطای تجمعی
• توقف ناگهانی بدون آسیب
• بدون جاروبک
• بدون نیاز به فیدبک پایدار
• ساختمان مکانیکی ساده
• راهاندازی ساده و ارزان
معایب استپ موتورها:
در سرعتهای خیلی بالا نمیتوانند کار بکنند. اگر در پروژه اینرسی بار زیاد باشد احتمال اینکه خطایی رخ دهد وجود دارد و آن خطا باید به نوعی اصلاح شود به این صورت که درسیستم کالیبراسیون قرار داد یا انیکه انکودری داشته باشید تا خطاها را تشخیص دهد. از دیگر معایب موتورهای پهای میتوان به موارد زیر اشاره کرد:
• توان خروجی محدود
• دوران با پله ثابت
• قادر به تغذیه بار با اینرسی زیاد نیست
• پرش و نوسان زیاد
• راندمان کم